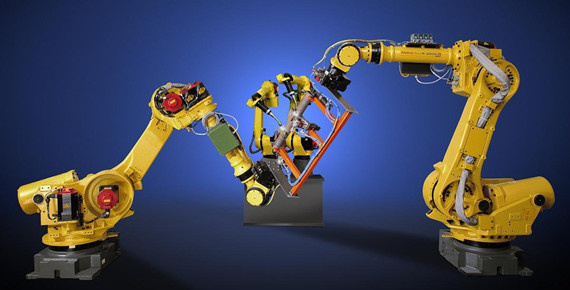
计算机控制的可再编程的多功能操作器,又称工业机器人。
它能在三维空间内完成多种操作。一般的产业机器人,如工业用机器人由手臂、腕、末端执行器和机身等部分组成,具有类似人类上肢的多自由度的运动功能,较高级的产业机器人是具有感觉、识别和决策功能的智能机器人。
产业机器人的种类繁多,分类方法也不统一。可按运动形态、运动轨迹、驱动方式、输入信息方式进行分类。产业机器人按手臂运动形态可分为直角坐标型、圆柱坐标型、极坐标型和多关节型。直角坐标型活动范围大;极坐标型能俯仰、回转和伸缩,可拾取地面的物品;圆柱坐标型能上下、伸缩和回转,占地小;而多关节型动作灵活、可以绕开障碍抓取工件,但抓的重量不大,结构和控制复杂。产业机器人按驱动方式分类,有液压式、气动式、电动式三种。液压式的操作力大、体积小(与气动相比)、动作平稳,但漏油问题不易解决,需要高压油源,功耗大,油路管道多,安装维修不方便。气动式比液压式干净,但出力比液压小,常用于简易机器人,作为机器人的手爪夹紧机构。电动式传动机构体积小、反应灵敏,有利于提高机器人的速度。采用这种驱动方式的机器人日渐增多。产业机器人按输入信息方式分类,可分为可编程序型机器人、数控机器人和智能机器人。可编程序型机器人是根据在线编程(示教)或离线编程的程序按顺序地进行各阶段动作的操作器,预定的程序是可变的。数控机器人是按照穿孔纸带、卡片或数字键盘所给的指令程序、位置或其他信息进行作业的操作器。智能机器人是通过感觉和识别来决定行动的机器人。
工业中应用较多的是示教再现机器人和有感觉的产业机器人。机器人按照控制方式可分为点位控制型和连续轨迹型。前者只严格控制机器人的手从一点到另一点的位置,不控制移动轨迹,例如抓放式机器人,只控制它将工件从某一位置上抓起和放到需要的位置,而不管它沿着什么路径移动。后者不但严格控制起止位置,还严格控制移动轨迹,例如焊缝的长度和形状(直线、圆弧或某种曲线)都是确定的,要求机器人的手严格按照焊缝进行焊接,而不能偏离焊缝去选择另外的移动路径(见弧焊机器人)。连续轨迹控制系统一般由插补器(直线插补器、圆弧插补器或其他二次曲线插补器)构成。此外,采用电子计算机和现代控制理论方法构成机器人决策系统和适应控制系统,可以扩大机器人的功能和适应能力。